Auto (Mission)
Auto is an autonomous flight mode that is used in both forward and vertical flight. Of all the modes available, Auto will be used the most. Following the preflight, your pre-planned mission will begin in Auto with an autonomous takeoff and end with an autonmous landing. You may intervene by changing flight modes as needed. Waypoints are flown through in sequence they are planned. However, in flight you can select specific waypoints to fly to within your mission using the Mission button in the GCS. The same Mission button is used to put the aircraft back into Auto if another flight mode was being used.
Applications: flying your mission (surveys, waypoints, loiter, etc.), autonomous takeoff and landing.
Forward Flight Modes
Guided (Forward Flight Mode)
The Guided mode is used when you want the aircraft to fly to a specific point on the map without setting up a mission. Swift GCS supports a “point and click” feature where you can click a point on the map and the aircraft will fly to that location and circle. The aircraft will circle at this spot until one of the following occurs: the Guided location is moved, the flight mode is changed, or a failsafe is triggered.
To enter Guided, select the Guided button in Swift GCS. Click the map where you wish to fly. The GCS will prompt you to confirm the altitude and direction of rotation (CW or CCW). The Guided location on the map is moved by dragging the point on the map. Once in place, the altitude and direction can be adjusted by clicking on the Guided button.
Applications: allows the GCS operator to intervene with a point and click interface, avoiding other air traffic, climb/descend at a specific location, holding pattern.
Rally (Forward Flight Mode)
The aircraft will automatically change modes to Rally if a failsafe activates, if you command Rally, or if a mission is completed without a landing planned. Once in Rally, the aircraft will fly to the nearest Rally point, within 5 kilometers, and circle there until commanded to perform some other action. If no Rally point is within 5 kilometers of the current aircraft position, the aircraft will fly "home" and circle at 100 meters. Home is where the aircraft was armed.
To manually enter Rally, select the Rally button in Swift GCS. The Rally point locations are chosen when you plan your mission.
Applications: failsafes, returning to a pre-planned location.
Cruise (Forward Flight Mode)
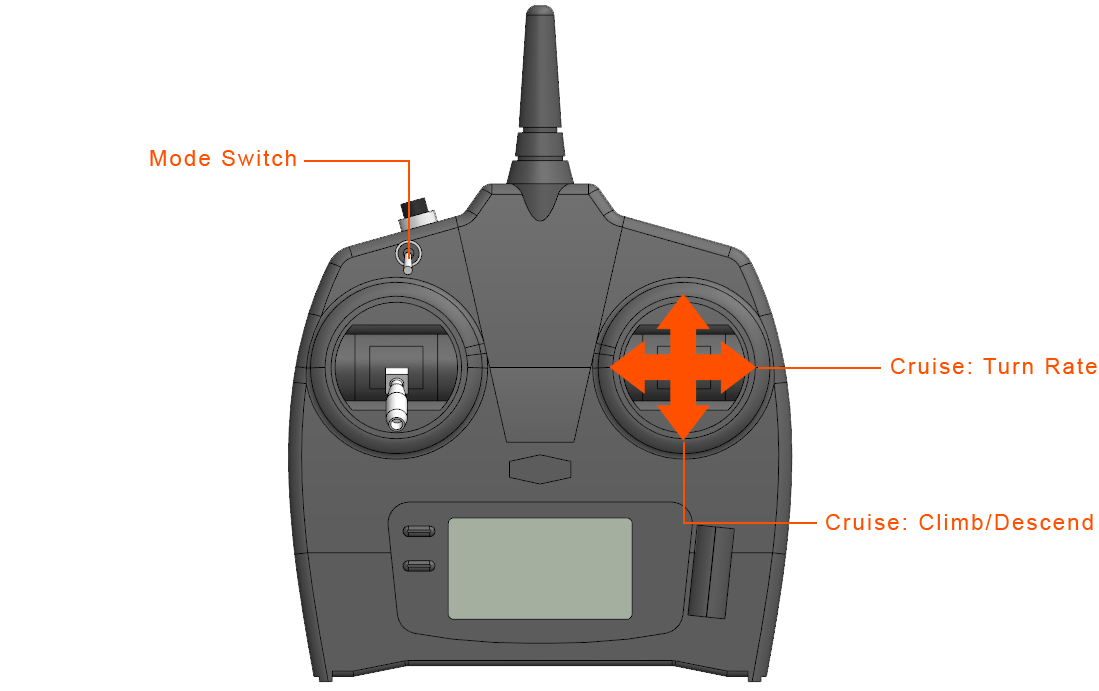
Cruise is a stabilized mode that allows the safety pilot to fly the aircraft in a gentle manner. The autopilot interprets the safety pilot's stick movements and translates them into a bank angle and climb rate which are both limited by the autopilot's parameters. For example, if you move the right stick on the RC controller all the way to the left, the aircraft will roll left to its limit of 45 degrees, and hold that bank angle. If you move the stick halfway, the aircraft will roll halfway to its limit, and so on. Moving the right stick forward/backward controls the rate of climb or descent and feels gentler compared to roll. The left stick is not used, and the aircraft will fly its normal airspeed regardless of stick position.
It is not possible to roll the aircraft past the roll limit, and it is not possible to pitch the aircraft beyond the pitch limit. Cruise is highly recommended over Manaul if the safety pilot needs to intervene during forward flight.
If the safety pilot has not touched the sticks within the last half second, the aircraft will roll level, hold its current altitude, and maintain its current ground course. The aircraft will crab to compensate for any crosswind, allowing the safety pilot to point the aircraft at a distant object and accurately track to that object. As such, Cruise requires GPS to maintain ground course.
Applications: allows the safety pilot to intervene within a defined flight envelope, flying a non-Auto landing pattern.
Fly-by-Wire "B" (Forward Flight Mode)
Fly-by-Wire B (FBWB) is another stabilized mode that allows the safety pilot to fly the aircraft in a gentle manner. FBWB is very similar to Cruise, except that it does not track ground course. The aircraft will fly level, but its course my drift depending on the wind. FBWB does not require GPS like Cruise does.
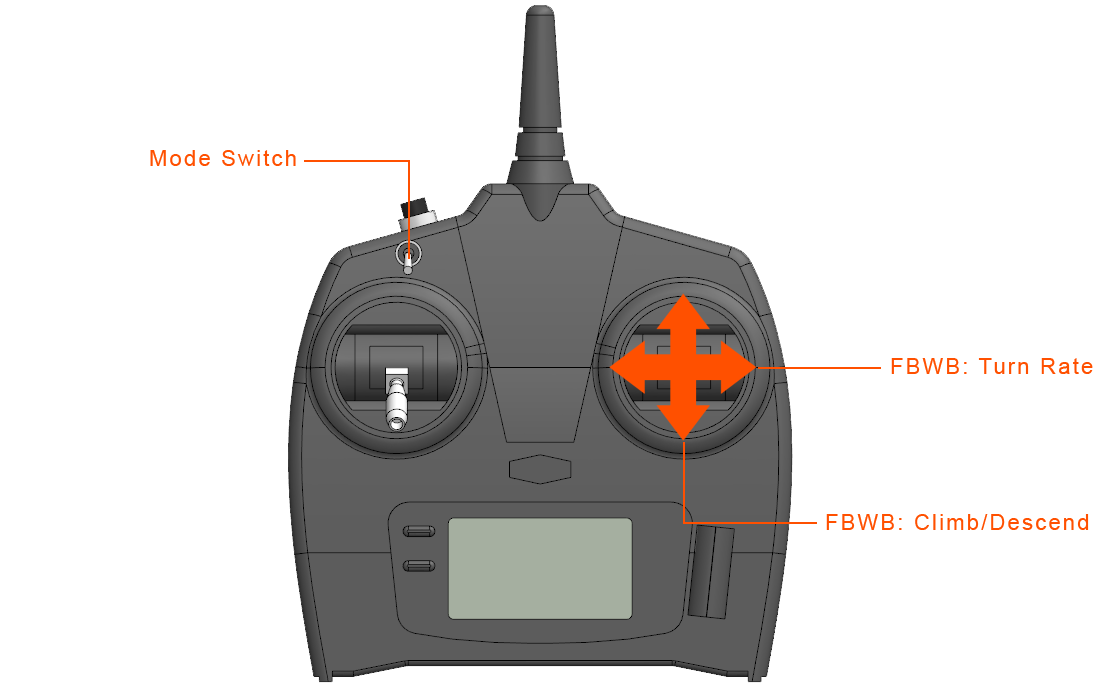
Applications: allows the safety pilot to intervene within a defined flight envelope, flying without GPS, flying a non-Auto landing pattern.
Caution: Although Cruise and FBWB are stabilized modes, neither will not stop you from flying the aircraft into the ground. Always be aware of your surroundings.
Manual (Forward Flight Mode)
The Manual flight mode gives the safety pilot full manual control of the aircraft. This bypasses all forms of autopilot stabilization. In this mode, the safety pilot is completely responsible for flying like an RC airplane. This gives the safety pilot the most control for an emergency scenario, allowing rapid alteration of the flight path, but requires expert skill. In Manual, the aircraft will feel extremely agile be very sensitive to your stick inputs. Do not use this mode if you are unprepared to fly the aircraft with zero autopilot stabilization. In most cases, Cruise or Fly-by-Wire is a better alternative if the safety pilot needs to intervene during forward flight.
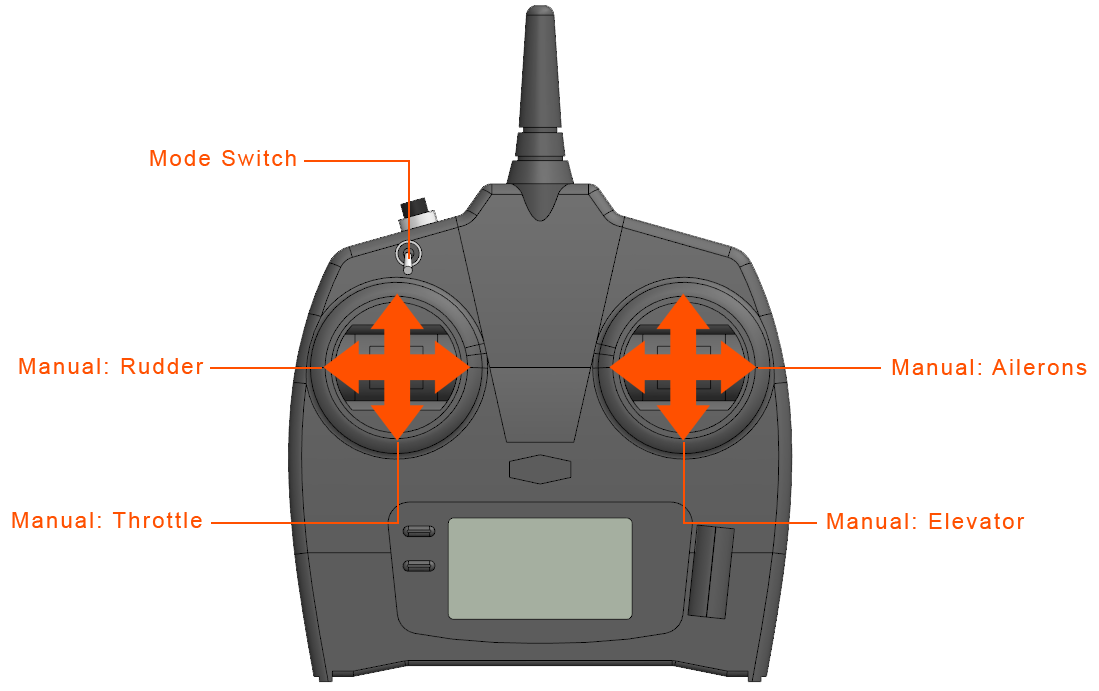
Applications: allows the safety pilot to fly with complete authority in forward flight.
Warning: The safety pilot assumes all responsibility for the aircraft when flying in Manual, and must be aware that they can get the aircraft into a state in which the autopilot cannot recover from.
Forward Flight Mode Comparison
| Forward Modes | Auto | Rally | Guided | Cruise | FBWB | Manual |
|---|---|---|---|---|---|---|
| Interface | GCS | GCS | GCS | Controller | Controller | Controller |
| Link | Telem | Telem | Telem | RC | RC | RC |
| Controlled by | Mission | Rally Point | Guided Point | Sticks | Sticks | Sticks |
| Autonomous | x | x | x | |||
| Stabilized Pilot Inputs | x | x | ||||
| GPS Required | x | x | x | x | ||
| Ground Track | x | x | x | x |
Vertical Flight Modes
Caution: Lynx VTOL has a limited battery capacity for vertical flight. Do not stay in vertical modes just to hover, use them only for takeoff or landing purposes.
QLoiter (Vertical Flight Mode)
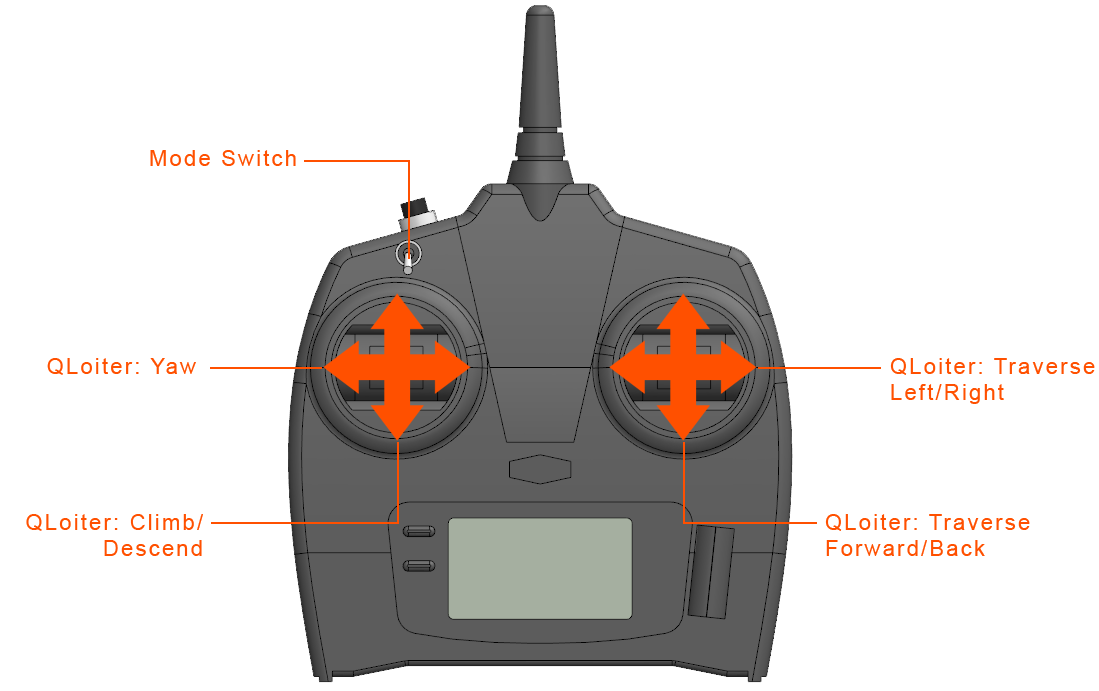
QLoiter is a stabilized mode that allows the safety pilot to hover the aircraft in a gentle manner. In QLoiter, the aircraft will hold position and altitude with sticks centered. As such, it requires GPS. You can climb and descend vertically by moving the left stick up or down from the middle position. Rolling and pitching the aircraft with the right stick will cause the aircraft to traverse left/right and forwards/backwards respectively. Yaw is controlled by sideways movement of the left stick. It is not possible to roll the aircraft past the roll limit, and it is not possible to pitch the aircraft beyond the pitch limit. Weathervaning and forward assist are enabled in QLoiter.
If the aircraft is in forward flight when this mode is entered, it will transition to a hover.
Applications: allows the safety pilot to intervene within a defined flight envelope if you have GPS, flying a non-Auto takeoff/landing.
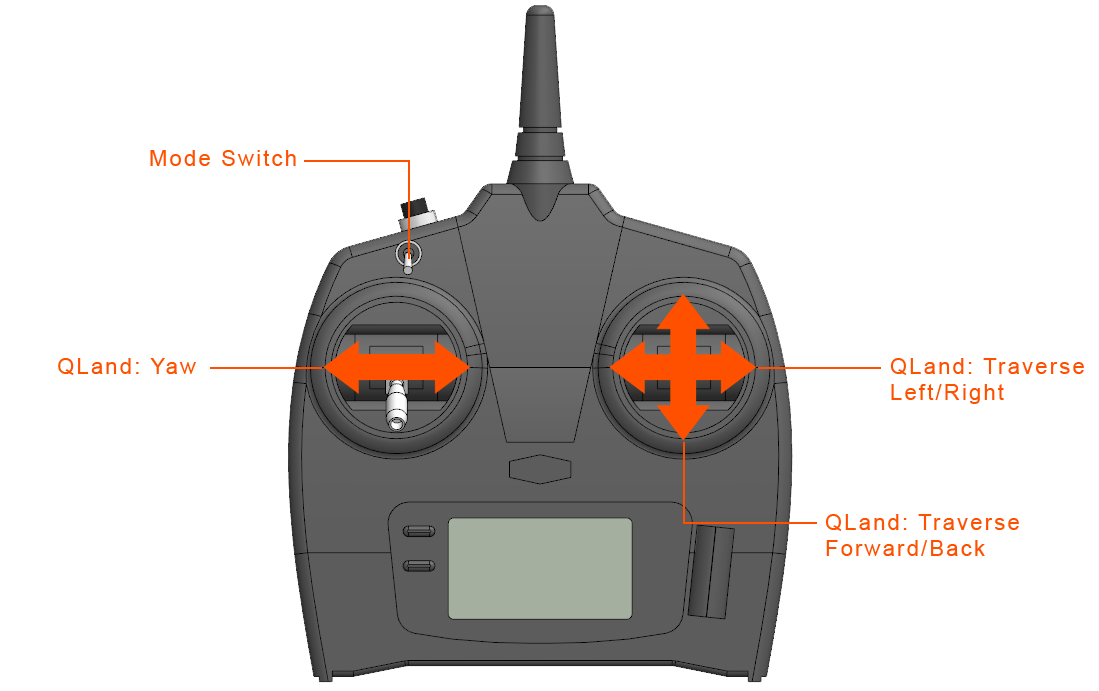
QLand (Vertical Flight Mode)
QLand is an autonomous flight mode in which the aircraft will use the VTOL motors to descend straight down from its current position in the sky. As such, it requires GPS. The descent speed is the same as an autonomous landing. Stick nudging is enabled for QLand, whereby the safety pilot can adjust the position of the aircraft as it descends, but can not slow or stop the descent. The aircraft will continue to descend towards the ground and disarm once it has landed.
If the aircraft is in forward flight when this mode is entered, it will transition to a hover and descend.
You can enter QLand by selecting Emergency Land from the Land button within the GCS.
Applications: emergency landing.
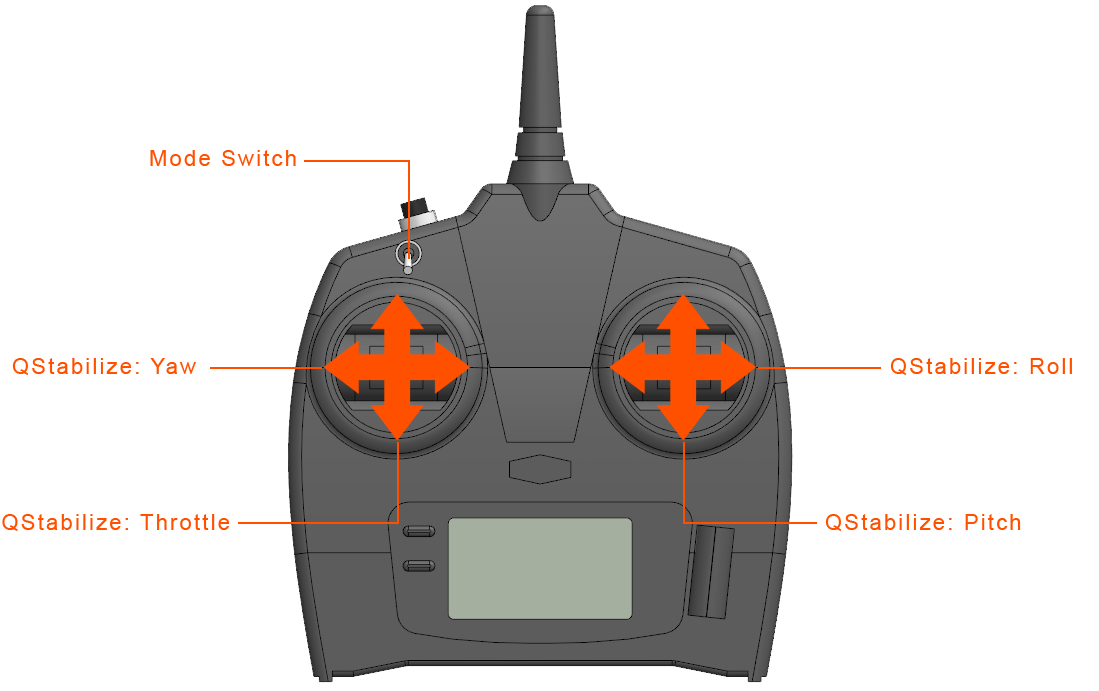
QStabilize (Vertical Flight Mode)
QStabilize is a stabilized mode that allows the safety pilot to hover the aircraft in a more aggresive manner than QLoiter. QLoiter does not hold position or altitude. As such, it does not require GPS. It is not possible to roll the aircraft past the roll limit, and it is not possible to pitch the aircraft beyond the pitch limit. QLoiter is recommended over QStabilize if the safety pilot needs to intervene during vertical flight or manually transition from forward flight.
If the aircraft is in forward flight when this mode is entered, it will transition to a hover.
Applications: allows the safety pilot to intervene within a defined flight envelope if you lack GPS.
Vertical Flight Mode Comparison
| Vertical Modes | Auto | QLand | QLoiter | QStabilize |
|---|---|---|---|---|
| Interface | GCS | Controller | Controller | Controller |
| Link | Telem | RC | RC | RC |
| Controlled by | Mission | Sticks | Sticks | Sticks |
| Autonomous | x | x | ||
| GPS Required | x | x | x | |
| Stick Nudging | x | |||
| Weathervaning | x | x | x | |
| Forward Assist | x | x | x |
Weathervaning and Forward Assist
With the exception of QStabilize, anytime the aircraft is in a vertical flight mode it will attempt to weathervane into the wind to reduce motor workload and increase wing lift.
Weathervaning will try to point the nose of the aircraft into the wind, but you should always point the aircraft into the wind prior to takeoff to increase performance.
The aircraft will also use the main motor, when 2 meters above the ground, to help maintain its position in higher winds. This is called forward assist and reduces the load on the vertical motors.