Changing Flight Modes
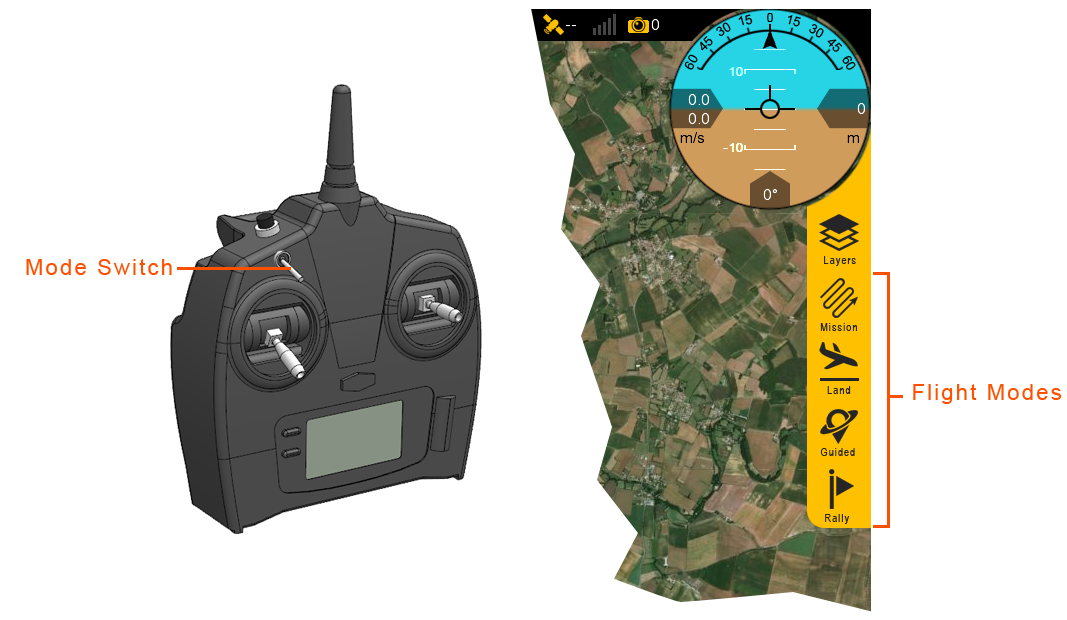
Changing flight modes can be done from either the RC controller or in Swift GCS. The RC controller has a three position switch that is dedicated to flight modes. Changing modes can be useful for a number of reasons such as modifying your mission, Safety Pilot intervention, or if you need to land early.
Whichever mode that was commanded last takes effect. For example, if the aircraft is in Auto but the Safety Pilot changes to Cruise, the aircraft will enter Cruise. If then, the GCS Operator changes back into Auto, the aircraft will enter Auto even though the mode switch on the RC controller is still in the middle position. If the Safety Pilot again requires Cruise, they must "bounce" the switch by briefly moving the switch to another mode and then back again. Never bounce the switch by moving it to Manual.
The current flight mode is displayed on the top status bar within Swift GCS.

Interrupting your Mission
If you need to interrupt your survey mission by changing out of Auto, the camera will stop taking pictures until Auto is resumed. When the mission is resumed, the aircraft will fly to the last waypoint it was trying to reach before changing modes. As such, you will most likely have to repeat the previous flight leg to ensure adequate image overlap. To do so, expand the list of waypoints under Mission and select the first waypoint of the line you want to refly.

Changing between Vertical and Forward Flight Modes
If the aircraft is in a vertical flight mode and is commanded into any forward flight mode (except manual), it will transition automatically to forward flight.
Warning: The aircraft will transition at whatever altitude and heading it is currently at. This can be extremely dangerous when close to the ground and must be avoided.
Caution: Changing from a vertical flight mode to manual will never perform a transition. Instead it will immediately shut off the VTOL motors. This will result in an immediate stall and loss of the aircraft. If the aircraft was accidentally put into Manual then simply change the mode back to the desired flight mode.
If the aircraft is in forward flight and is commanded into any vertical flight mode, the aircraft will transition to a hover and may climb or descend depending on the mode or RC controller stick position (if applicable).
The distance the aircraft will travel while transitioning to a hover depends upon the ground speed of the aircraft.
Configuring Modes on the RC Controller
Not all modes listed below are available on the RC controller as standard. The standard configuration is Manual, QLoiter, and Auto. Manual and Auto must remain, but the middle position can be re-configured.
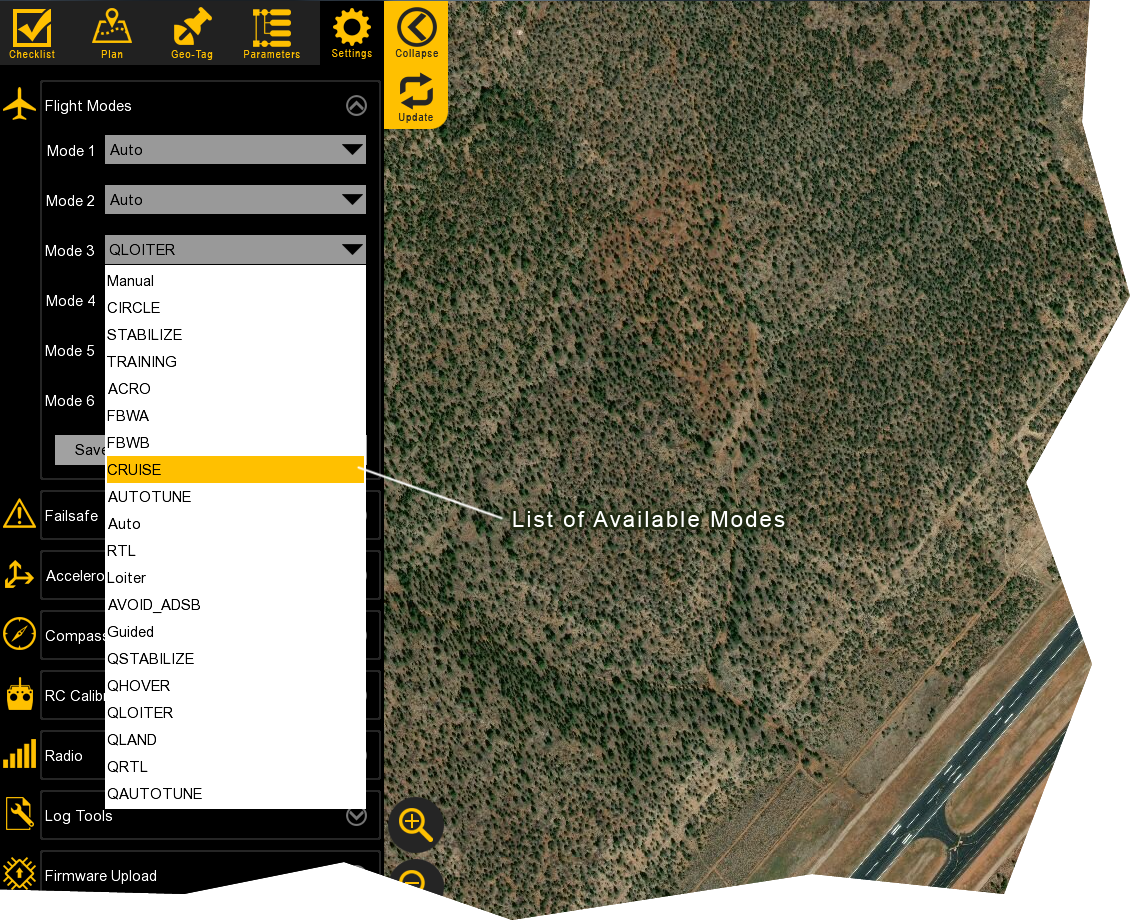
To re-configure the middle position, go to the Settings tab in Swift GCS and expand the Flight Modes menu. You will notice that modes 1-2, 3-4, and 5-6 are paired. The autopilot supports six positions for modes, but the RC controller switch only has three positions. As such, if you re-configure, mode 3 and 4 must match.
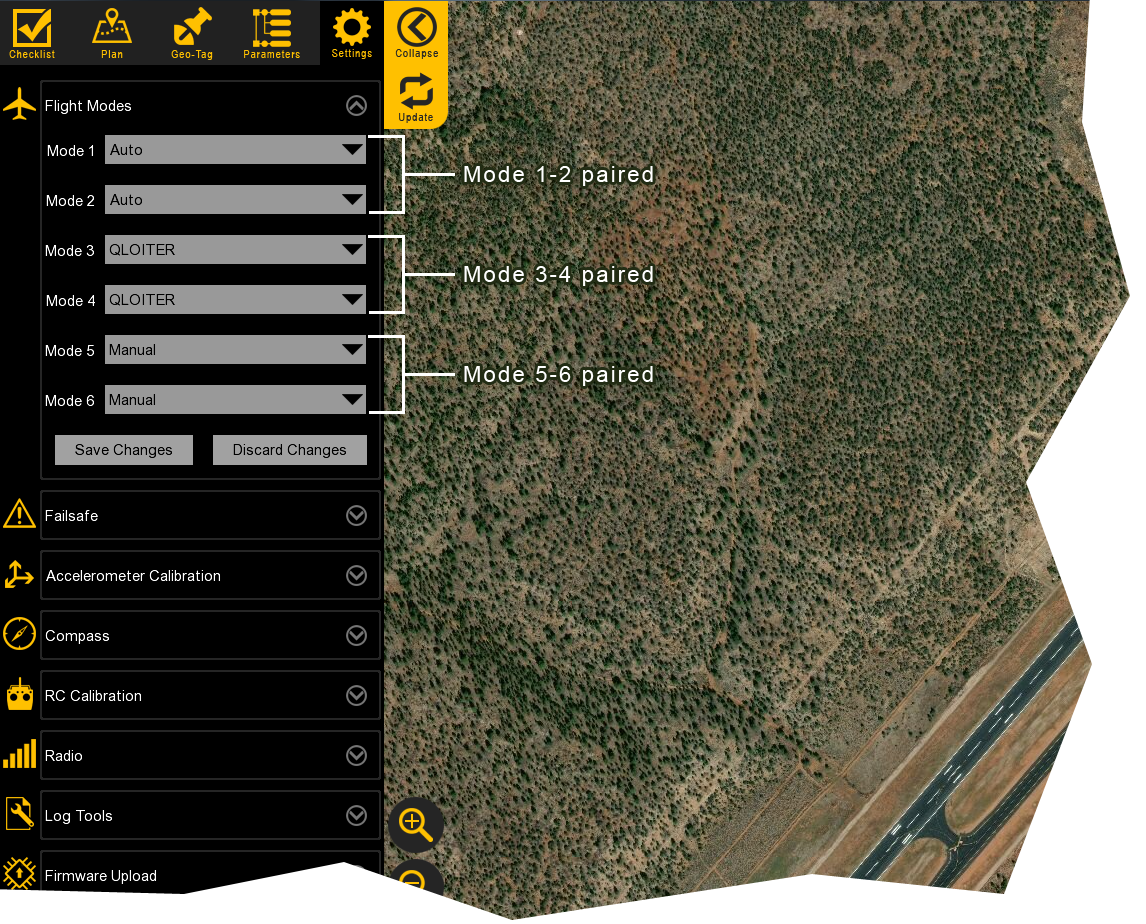
Expanding a mode reveals the list of options. You must save your changes for the new configuration to take effect.
Caution: Only select from modes described in the Lynx VTOL manual (Cruise, FBWB, QLoiter, QLand). Other modes are strictly reserved for testing.